Управление рукой
Соблюдая все традиции дистанционного управления, я решил сделать для своей кибернетической руки управляющую перчатку. Чтобы рука повторяла все движения перчатки. Весь вопрос был в том, что использовать в качестве датчика. Покупной тензометрический датчик изгиба мне показался тогда дороговатым решением. Проработав разные варианты, я захотел самостоятельно изготовить оптический датчик изгиба. Для этого потребовался кусок силиконовой трубки, светодиод, фототранзистор и пара резисторов (для одного датчика).
Принцип работы следующий: с одной стороны трубки устанавливается светодиод, а с другой — фотоэлемент. Сопротивление фотоэлемента зависит от светового потока, попадающего на него и соответственно от угла сгиба трубки. Таким образом, сгибая палец, мы меняем уровень аналогового сигнала на входе контроллера, который в свою очередь, с помощью сервопривода поворачивает палец на механической руке на нужный угол.

Механическая рука очень хорошо повторяла все движения перчатки, а также позволяла захватывать разные предметы, например, маленький мячик. Коллеги и друзья были приятно удивлены получившейся робототехнической игрушкой.
К сожалению, дальше я забросил этот проект, переключившись на более интересные темы. Но этот первый опыт, тот детский восторг, когда ты собираешь это своими руками, навсегда останется в моей памяти. С тех времен осталось только одно любительское видео, которое я даже раньше и не планировал публиковать.
С тех пор я перепробовал много разных технических направлений. Но робототехника покорила меня навеки. В следующих публикациях (например, Робот-муравей) вы увидите мои новые, более интересные творения!
Как создаются аниматроники
Эти уникальные куклы-роботы изготавливаются поштучно из-за своей сложнейшей программы. Каждый аниматронный персонаж производится с нуля: собирается скелет, затем воссоздаётся внешность – накладывается кожа натурального цвета, подбираются черты лица, причёска. Робот может быть просто похож на человека, а может иметь портретное сходство с определённой личностью
В этом случае важно добиться максимальной идентичности.
Для того чтобы робот не деформировался, совершая различные движения, специалисты применяют профессиональную краску. В качестве внутреннего наполнения у аниматроника – аккумуляторы, сервомоторы и другие сложные механизмы.
Наиболее эффектно смотрятся аниматроники на радиоуправлении, так как за ними не тянутся провода.
Основными этапами создания: являются
-
Рисование трёхмерного макета человека или животного.
-
Изготовление статичных и подвижных стальных частей скелета. Подвижные части приводятся в движение микроконтроллером.
-
-
Воссоздание внешнего вида по прототипу с использованием различных материалов. Для шкур животных берётся искусственный мех, когти вытачивают из дерева, а нос и пасть изготавливают из пластика.
-
Обеспечение звуковых эффектов. Например, чтобы «научить» аниматроника белого медведя рычать, специалистам нужно пойти в зоопарк и записать на диктофон рычание настоящих медведей.
-
Установка датчика движения, при помощи которого аниматроник активируется при приближении к нему человека.







Качественно изготовленные аниматроники создают полное ощущение того, что перед вами находится живой человек или животное.
Часто задаваемые вопросы и ответы на них
Любое изделие, оснащенное механизмами издает шумы в работе. Снижение уровня шума возможно лишь при изготовлении нескольких прототипов, подборе различных вариантов приводов, модернизациии изделия, что существенно сказывается на сроках и стоимости работ.
Вся мехатроника, система управления и двигатели подбираются на начальной стадии- этапе согласования с Заказчиком технического задания и разработки проекта. Мы стараемся по мере возможности выполнять пожелания заказчика, но пожелания идущие в разрез с ТЗ, либо поступившие слишком поздно, на завершающем этапе работ не могут быть выполнимы технически, либо требуют переработки конструкции, следовательно, увеличения сроков и стоимости работ.
Аниматроника и робототехника, по своей сути, относятся к опытноконструкторским работам, результат которых сложно предугадать на 100%, так как это не серийные изделия, и возможно, понадобится время на тестирование и «доводку» изделия «до ума». Сроки работ, указанные в техническом задании, несомненно, для нас важны, и мы сделаем все, что в наших силих, чтобы предоставить изделие Заказчику в срок.
Условия эксплуатации- улица/помещение обговариваются на стадии согласования технического задания. Если механизированный манекен предназначен для эксплуатации на улице, то только в сухую погоду.
В целях безопасности категорически не рекомендуем допускать детей вплотную к менханизированным изделиям. Механизмы по возможности делаются вандалоустойчивыми, но могут сломаться при неаккуратном обращении.
В процессе работы на каждой стадии наши скульпторы и художники высылают промежуточные фото отчеты Закзачику. В случае возниконвения комментариев по внешенму виду принимаются меры по их исправлению, в соответствии с согласованным техническим заданием.
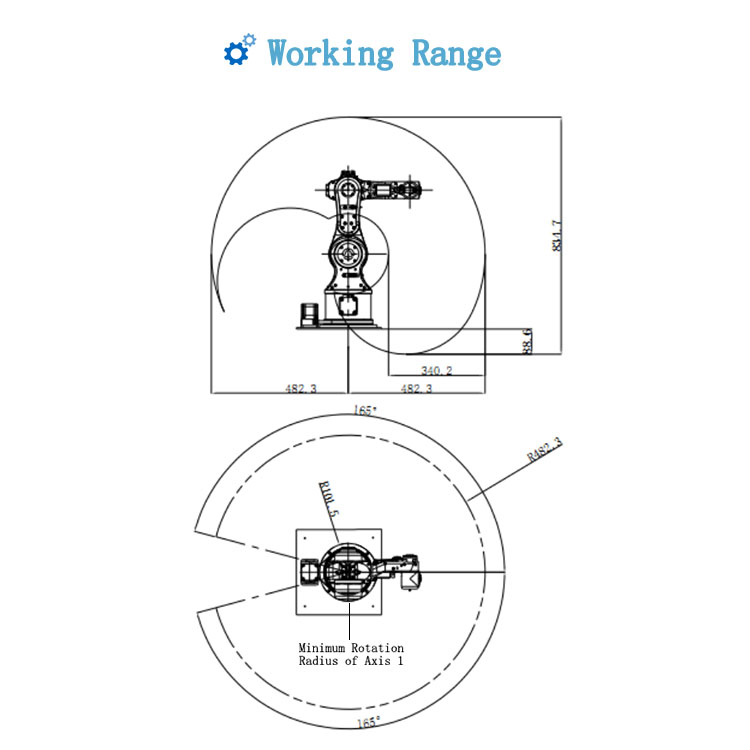
Конструкция
Набравшись вдохновения и смелости, я заказал несколько китайских сервоприводов и в ожидании посылки занялся проработкой конструкции. С 3D-печатью в то время были сложности (было реально дорого), поэтому я решил сделать конструкцию из дерева. Для этого понадобились пара деревянных дощечек, черенок от детской лопаты, толстая леска, немного крепежа и несколько вечеров, когда я, забыв про все на свете, строгал свое будущее творение.
Кисть вместе со всеми пальцами я сделал по образцу вышеупомянутого художника. А конструкцию предплечья уже разрабатывал самостоятельно с подгонкой под имеющиеся материалы и технические возможности. Здесь приведу модель этого узла.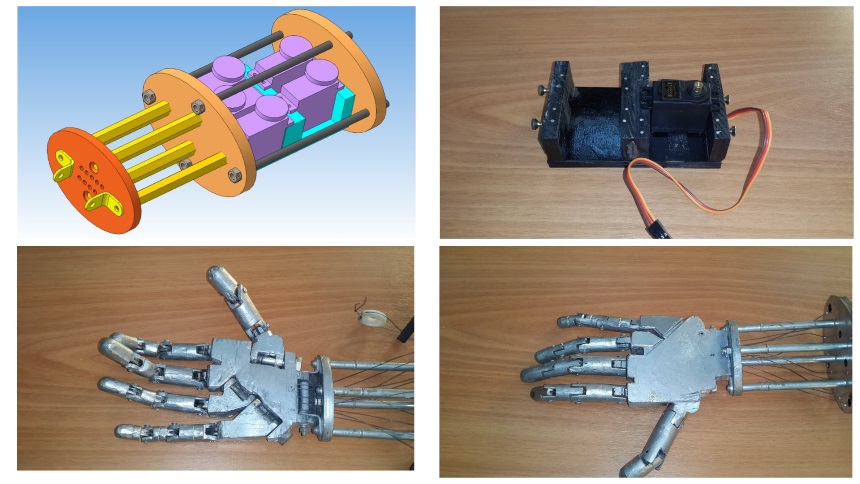 Микроконтроллер взял взаймы у коллег по работе. Мне попалась отладочная плата с МК STM32L152. Для моих целей этого было более чем достаточно. Навыков программирования такого железа я не имел, поэтому вооружившись интернетом удалось на базе IDE Cocos создать рабочий алгоритм для управления механической рукой. Суть алгоритма проста: 5 входов контроллера настроены как аналоговые входы и при изменении сигнала на входе соответствующим образом меняют ширину управляющего импульса для сервопривода.
Микроконтроллер взял взаймы у коллег по работе. Мне попалась отладочная плата с МК STM32L152. Для моих целей этого было более чем достаточно. Навыков программирования такого железа я не имел, поэтому вооружившись интернетом удалось на базе IDE Cocos создать рабочий алгоритм для управления механической рукой. Суть алгоритма проста: 5 входов контроллера настроены как аналоговые входы и при изменении сигнала на входе соответствующим образом меняют ширину управляющего импульса для сервопривода. Для таких целей этот модуль подходит с избытком по необходимой периферии. Но другого под рукой просто не было.
Для таких целей этот модуль подходит с избытком по необходимой периферии. Но другого под рукой просто не было.
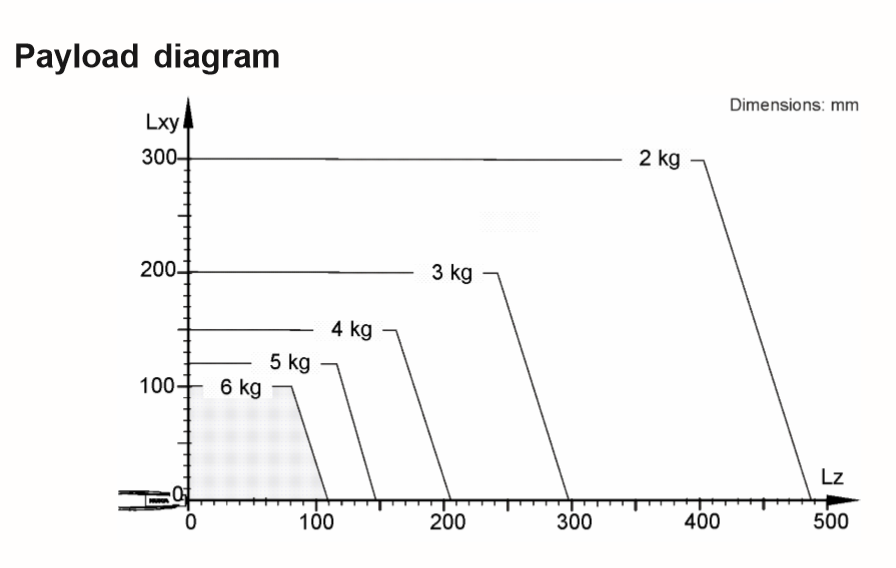
В качестве сервоприводов были выбраны MG995 с металлическим редуктором и с достаточно высоким вращательным моментом порядка 10 кг/см. Диапазон ширины импульса такого привода составил — 500 … 2500 мкс, угол поворота -90 … +90°.

Как сделать аниматроника из железа
Для создания руки робота используется кусок гофрированной пластиковой трубки, коробка от компакт-диска, бечевка, клей и изолента. Сам манипулятор получается достаточно прочным для того, чтобы удерживать, например, бутылку или сотовый телефон.







Сначала, сделайте шаблон руки робота на листе бумаги, используя вашу собственную руку. Разметьте шарниры для каждого «пальца».

Из пластиковой трубки, которую электромонтеры используют для прокладки проводов, сделайте «пальцы». Трубка легко режется обычным канцелярским ножом. Отрезайте трубку на длину равную расстоянию от конца вашего пальца до запястья. Сделайте это для всех «пальцев» роборуки. На получившихся трубках, следует разметить маркером шарниры и затем сделать V-образные вырезы для каждого сгиба.

Вставьте и закрепите нейлоновую бечевку в каждый палец-трубку. Оставьте достаточно длинные концы (вы всегда сможете их обрезать позже).

Используйте старую CD-коробку, чтобы получить кусочек пластмассы. С помощью вырезанного кусочка пластмассы соедините «пальцы»: приклейте «пальцы» чуть ниже шарниров-костяшек.

Убедитесь, что вы расположили «пальцы» в правильном порядке.

Теперь можно удалить изоленту, фиксирующую бечевку, и сделать несколько витков изолентой, чтобы покрепче соединить «пальцы».

Большой «палец» приклейте так, как показано на фотографии, и для прочности зафиксируйте изолентой.

Воспользовавшись остатками вашей CD-коробки, сделайте запястье.

Кисть получившейся руки робота лучше укрепить, вставив ее в более жесткую трубку.

К «ладони» и концам «пальцев» можно приклеить поролон.

Рука робота может использоваться в самых различных проектах аниматроники . Для управления рукой можно использовать сервомоторы, соединив концы бечевки с «качалкой», закрепленной на их оси. Достаточно двух сервоприводов, чтобы рука робота «ожила». Один серводвигатель при этом соединяют с большим «пальцем», а другой — с остальными. Чтобы рука выглядела в аниматронных проектах более эффектно, на нее можно надеть мягкую тонкую перчатку.









Статьи раздела РОБОТЫ СВОИМИ РУКАМИ
Изначально данная схема предназначена для таких приложений, как Animatronics либо Puppeteer. Кроме того, её применение допускается при изготовлении звуковых игрушек, а также подвижных роботов. Главной изюминкой рассматриваемой платы является то, что именно она управляет движением рта игрушек, когда они издают какой-нибудь звук.
Плата передает сигнал движения после получения звуковой команды. Этот сигнал поступает на электрическую цепь типа RC. Угол поворота подвижных элементов и степень раскрытия рта игрушек напрямую зависят от интенсивности акустического колебания. Движения сервисных приводов пропорциональны уровню поступающего звука.
Вся цепь системы имеет четырехканальные сервоприводы. Первый канал управляется непосредственно звуком. Контроль над остальными тремя сервоприводами обеспечивает потенциометр бортового триммера. Оставшиеся три канала помогают управлять другими движениями аниматронной конструкции.
Алгоритм работы всей системы довольно простой. Сперва плата улавливает звук при помощи микрофона. Данный звук преобразуется в постоянное напряжение. Микроконтроллер типа PIC16F72 превращает напряжение в сигнал типа PWM. Функционирование системы обеспечивается 6-ю Вольтами постоянного тока. Во время эксплуатации рекомендуется задействовать аккумулятор для низкого джиттера.
Ключевые особенности платы:
- для оптимальной работы требуется 6 В постоянного тока;
основу системы составляют четырехканальные сервоприводы;
1-й канал управляется звуком;
другие три канала управляются интегрированным потенциометром;
имеется контакт типа CN7;
плата оборудована светодиодным индикатором питания типа D2;
бортовой потенциометр управляет сервоприводами через контакты CN6, CN8 и CN9;
контакт типа CN5, предназначенный для RC-цепи, работает со звуком.
Далее схематически показано то, как функционирует вся рассматриваемая система:

Ниже идет полный перечень применяемых деталей:

Далее идёт фотография готовой схемы для аниматроники:

Завершается наш обзор изучением печатных плат:
Для особо искушенных клиентов мы готовы предложить аниматроны – механизированные фигуры людей, животных, мультяшных и кино-персонажей.
Стоимость каждой фигуры рассчитывается индивидуально, исходя из требуемых характеристик изделия. Будет хорошо, если вы отправите картинку, как это должно выглядеть.








Для расчета стоимости нам необходимо понять:
- где будет установлен манекен (улица / помещение)
- что будет двигаться у фигуры, будет ли озвучка
- необходим ли монтаж нашими специалистами
- внешний вид